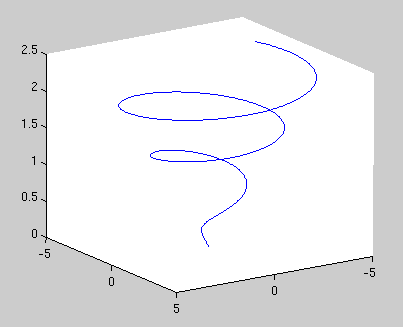
3D Cones Trajectory Design
Read the MRM paper: Design and Analysis of a Practical 3D Cones TrajectoryNote: A new, improved version of the algorithm has been implemented. Untar this file to get the latest version. Note that some of the interfaces have changed.
|
Here are the files you need to generate 3D Cones Trajectories:
findcone.m
gencone.m
wc.c
mrewind.m
intlineellipse.m Please e-mail ptgurney at mrsrl dot stanford dot edu if you have any questions. A brief note to say that you're using these functions would also be greatly appreciated so that I can let you know if any bugs/errors are found/fixed. Thanks!
|
 |
Notes/Errata
There is a step missing in section "Designing Waveforms for a Range of Polar Angles" of the paper. In addition to passing in the substituted RESrange and THETArange values, Gtwist must be scaled by sqrt(1+sin(THETAlower)^2/sin(THETAupper)^2*tan(THETArange)^2)/sqrt(1+tan(THETArange)^2). The above MATLAB functions are correct. Questions? Please email me!
Updated July 1, 2007